Bien que la mise en œuvre de la lévitation magnétique est en cours de validation, les réflexions à propos de la propulsion électromagnétique avancent.
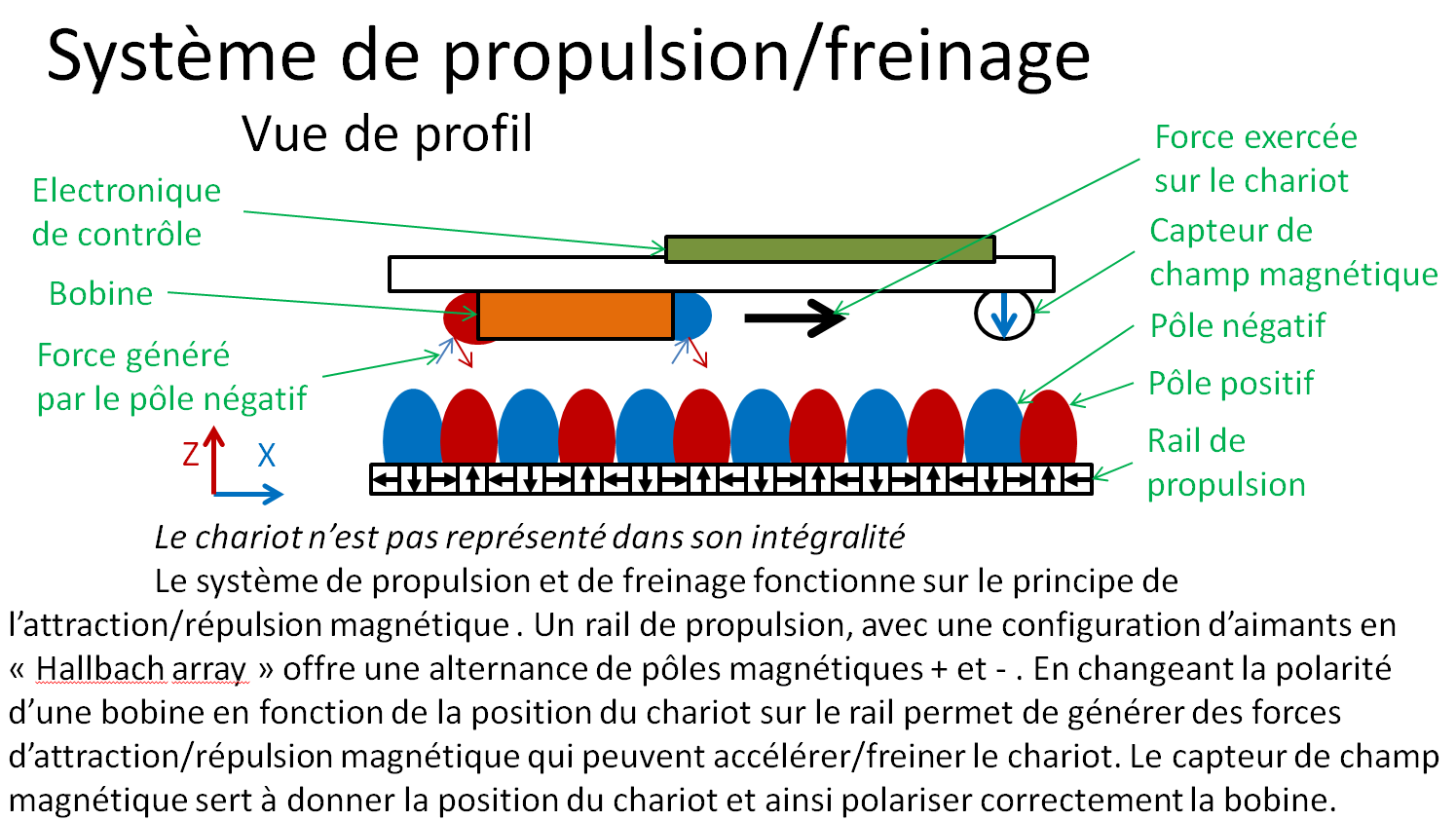
Ainsi, l’étape 2 vise à mettre au point un système de propulsion électromagnétique qui fonctionne comme décrit dans l’image ci-jointe.
Au niveau magnétique:
Il est envisagé d’utiliser des aimants W-05N pour faire le rail de propulsion. Ces aimants sont très puissants et, de par leur petite taille permettrons de tester plusieurs mise en place analogues ci nécessaire.
Nous pressentons des problèmes potentiels de compatibilité entre le système de sustentation et le système de propulsion magnétique. En effet, si les aimants sustentateurs du chariots sont attirés par les pôles négatifs du système de propulsion, l’hyperloop va rapidement devenir très instable. -> Nous anticipons donc le fait qu’il faille écarter les rails de sustentation magnétique.
Au niveau électronique, le montage reste assez simple:
Batterie 12V pour alimenter le système
Capteur de champ magnétique à identifier
Arduino pour commander l’accélération/freinage
Etage d’amplification pour la bobine (référence connue à retrouver)
Bobine analogue à celle utilisée ici -> Voir si on peur en trouver une “mieux”
Bonjour. J’avais signalé en son temps que des études très poussées sur ces questions ont été réalisées à l’Ecole Polytechnique Fédérale de Lausanne (Suisse) dans le cadre du projet “Swissmetro” (https://fr.wikipedia.org/wiki/Swissmetro ; https://swissmetro.ch/fr/), études qui se sont étendues sur des décennies. Il serait dommmage et peu utile de “réinventer la roue” (même s’il n’y en a pas en l’occurrence ).
Merci beaucoup Pierre-André, as-tu un site web ou des sources qui montrent (voire qui expliquent) les choix technologiques qui ont été fais pour le swiss metro/ l’hyperloop?
De plus, compte-tenu des dimensions réduite du miniloop (=hyperloop miniature), je m’appercois que les choix technico-économiques ne sont pas les mêmes que lorsque l’on fabrique un grosloop. Par exemple, supra conducteurs et électroaimants sont pertinents et performants à grande échelle là où aimant permanents suffisent à petite échelle .
Ensuite, compte-tenu de la relative simplicité des montages et de mon envie personnelle de redécouvrir les choses par moi-même je préfère échouer et comprendre pourquoi ca ne fonctionne pas plutôt que de rechercher une solution sur le web. Compte-tenu que nos deux approches sont complémentaires, nous pouvons en discuter avec plaisir.
Bonjour,
Pour répondre (je l’espère) à votre question, l’outil de recherche de l’EPFL (Ecole Polytechnique Fédérale de Lausanne) donne accès à de nombreuses références sur le SWISSMETRO: https://search.epfl.ch/?q=SWISSMETRO.
Bien cordialement.
Pierre-André Haldi
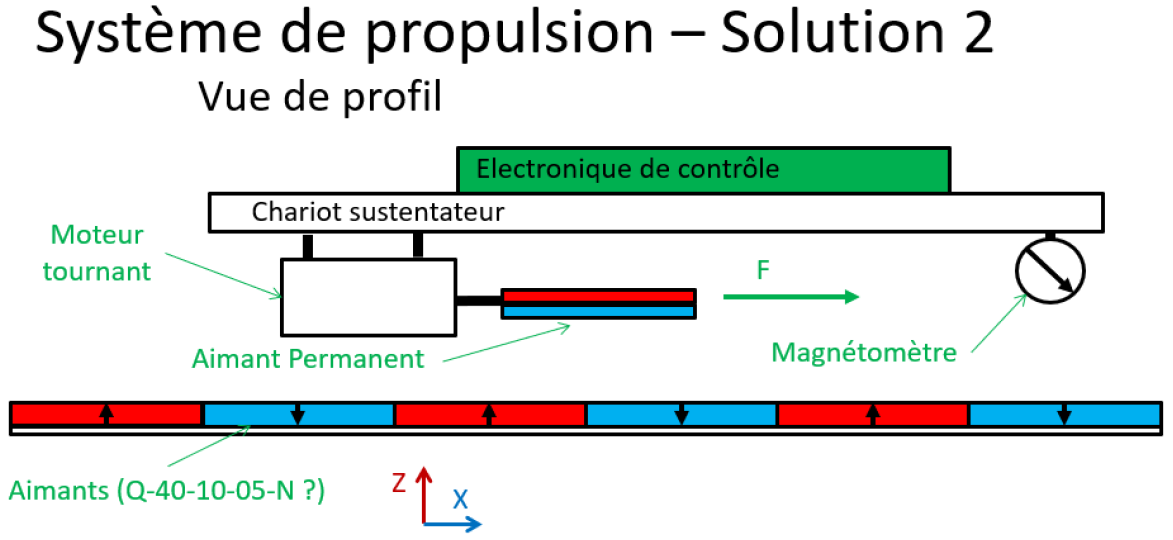
Une deuxième solution consiste à faire pivoter un aimant autour de son axe central : On expose alternativement sa face nord et sa face sud au rail de propulsion, ce qui entraine ainsi le déplacement du wagon. Intuitivement, cette méthode parait plus simple à mettre en œuvre et plus économe en énergie que la solution de la bobine aimantée.
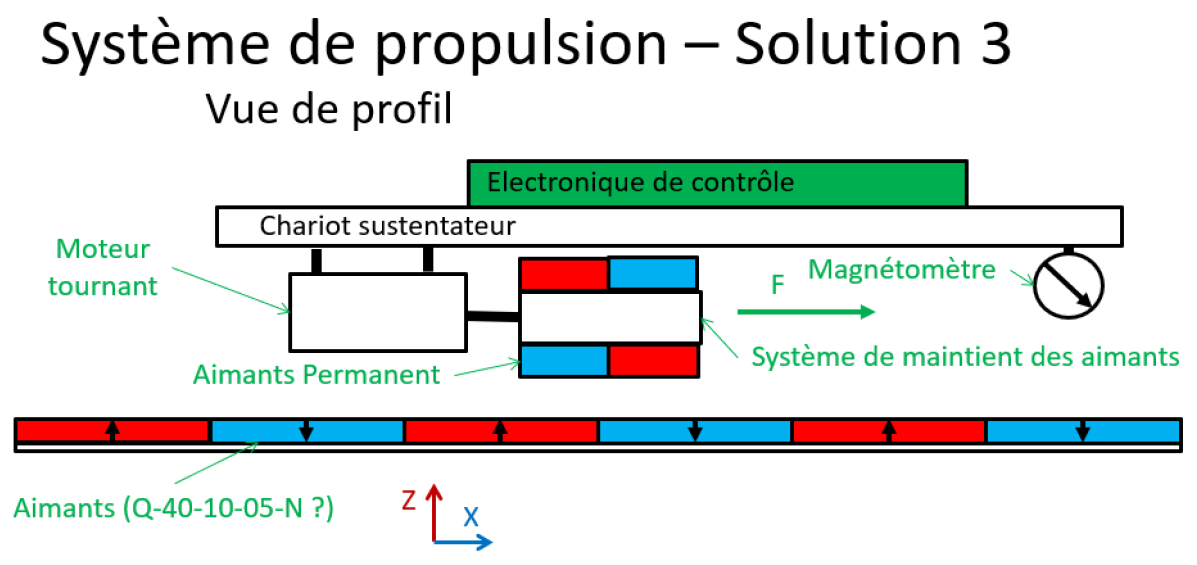
En poussant la réflexion de l’architecture 2, cette troisième solution consiste à faire pivoter plusieurs aimants autour de son axe central : Ainsi, les faces nord et sa face sud des aimants sont alternativement présentées au rail de propulsion, ce qui entraine ainsi le déplacement du wagon. Intuitivement, cette méthode parait légèrement plus complexe à mettre en œuvre que l’architecture 2 mais présente l’avantage de pouvoir rapprocher les aimants du rail de propulsion à notre guise, ce qui améliorerait le rendement.
Les architectures 2 et 3 présentent la spécificité de devoir maintenir les aimants (pièces relativement lourdes) sur l’axe d’un petit moteur. Il faudra donc prévoir un système qui permette de maintenir les aimants tout en minimisant les efforts sur l’axe du moteur.

 ).
).