Lévitation magnétique assurée par des aimants permanents
La conception du système de lévitation s’oriente naturellement vers un système d’aimants permanents. En effet, celui-ci présente de nombreux avantages:
- Passif: l’hyperloop miniature ne consommera donc de l’énergie que lors de son déplacement, pour assurer son positionnement et pour avancer.
- Simple de conception et de mise en oeuvre: consitué seulement de deux aimants en répulsion, le principe physique en œuvre est basique
- Economique: (Beaucoup) moins cher qu’un système d’aimant supraconducteurs et présentant moins de risques.
Actuellement, la lévitation magnétique est assurée par:
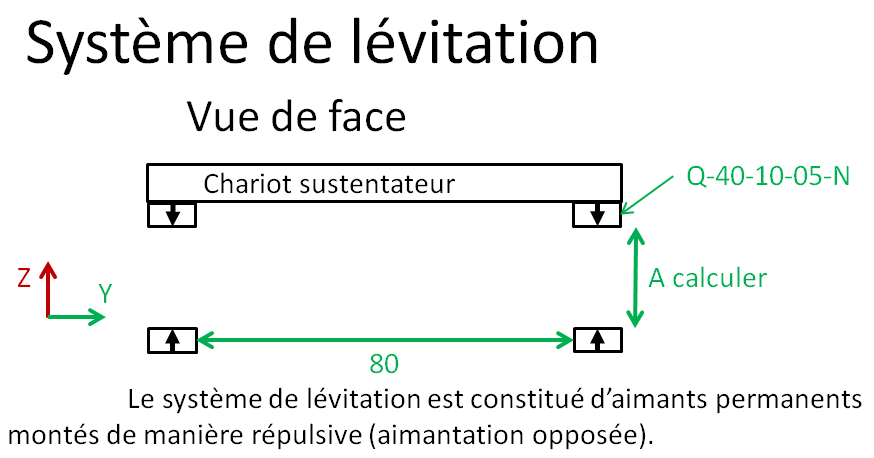
- Deux rails fixes de 1m constitués de d’aimants Q-40-10-05-N de supermagnete et séparés de 8 cm chacun
- Un chariot mobile de 10cm x 8 cm comportant 4 aimants montés de manière répulsive
Le montage est assez instable, et le chariot présente des risques de retournement.
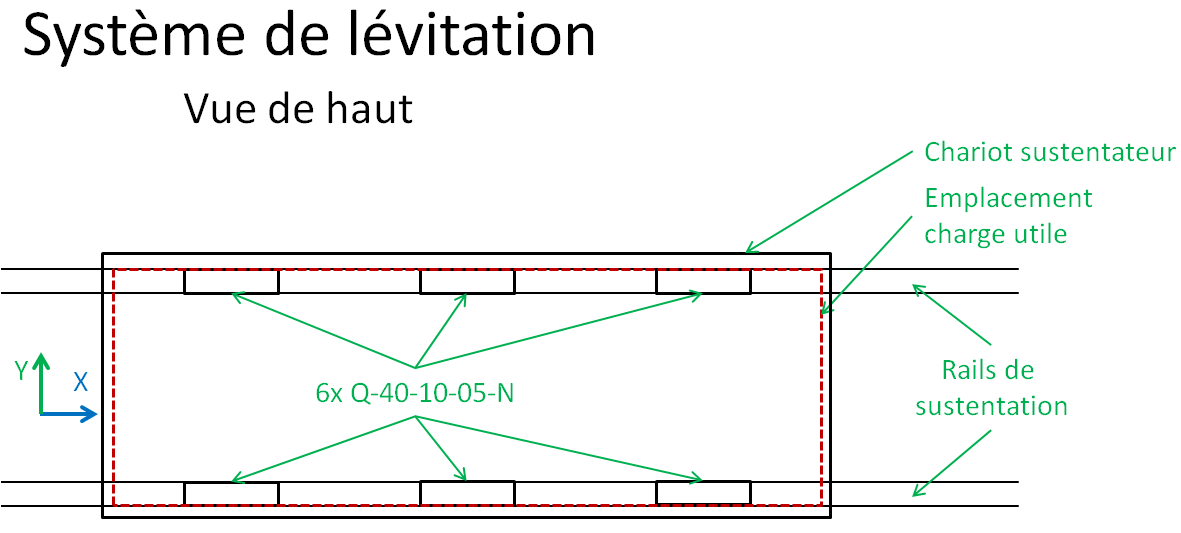
Dans la future version sur laquelle je suis ne train de travailler:
- J’envisage de garder les rails de 1m, bien que ceux-ci peuvent être améliorés
- Le chariot sera remplacé par un chariot plus grand de taille 300x100 mm^2 et disposant de 6 aimants Q-40-10-05-N
Cela devrait permettre de:
- Palier aux problèmes d’instabilités imputés à la petite taille du chariot
- Pourvoir permettre de “porter” plus de 3kg (calcul de dimensionnement à ajouter dans un prochain post)