Le projet en est actuellement à l’étape 1: Apprendre à maîtriser la lévitation et le guidage magnétique.
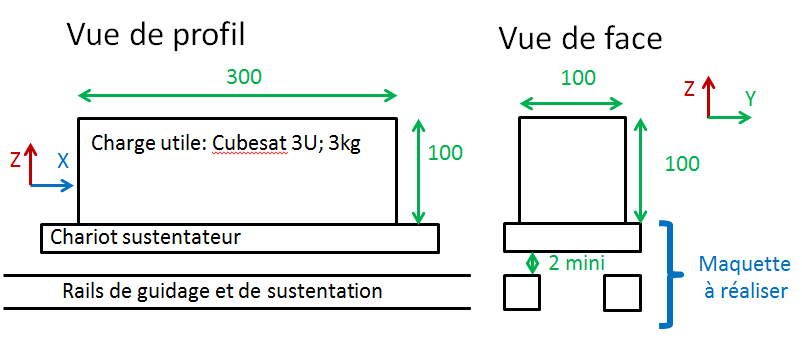
Afin de gagner rapidement en compétence et en savoir-faire sur ce point, j’ai commencé à réaliser une première dont l’objectif est de parvenir à faire léviter le long d’un rail magnétique un chariot capable de supporter l’équivalent d’un cubesat 3U : 300x100x100mm^3 et 3kg.
Le choix de la norme Cubesat est dû au fait que, on pourra faire des échanges de technologies entre Hyperloop miniature/cubesats dans de futures versions du projet.
De plus, pour que l’hyperloop miniature ait un intérêt, il importe qu’il soit capable de porter des charges lourdes et imposantes. La norme Cubesat semble donc particulièrement adaptée pour cela.
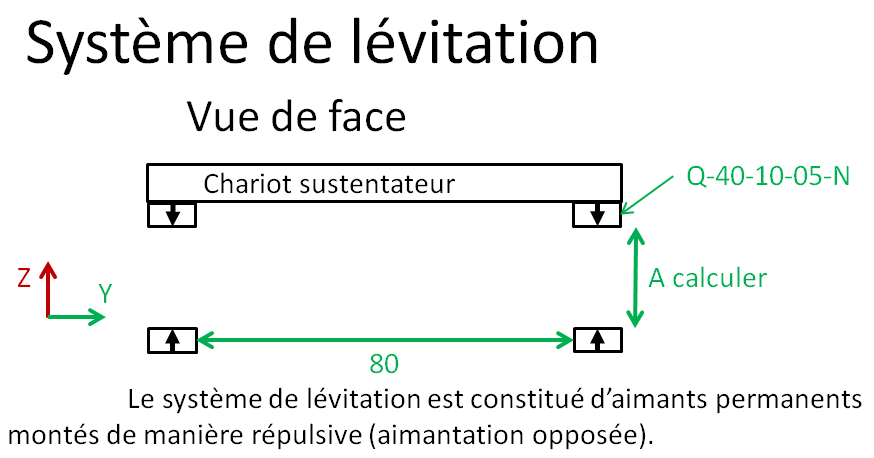
Lévitation magnétique assurée par des aimants permanents
La conception du système de lévitation s’oriente naturellement vers un système d’aimants permanents. En effet, celui-ci présente de nombreux avantages:
Passif: l’hyperloop miniature ne consommera donc de l’énergie que lors de son déplacement, pour assurer son positionnement et pour avancer.
Simple de conception et de mise en oeuvre: consitué seulement de deux aimants en répulsion, le principe physique en œuvre est basique
Economique: (Beaucoup) moins cher qu’un système d’aimant supraconducteurs et présentant moins de risques.
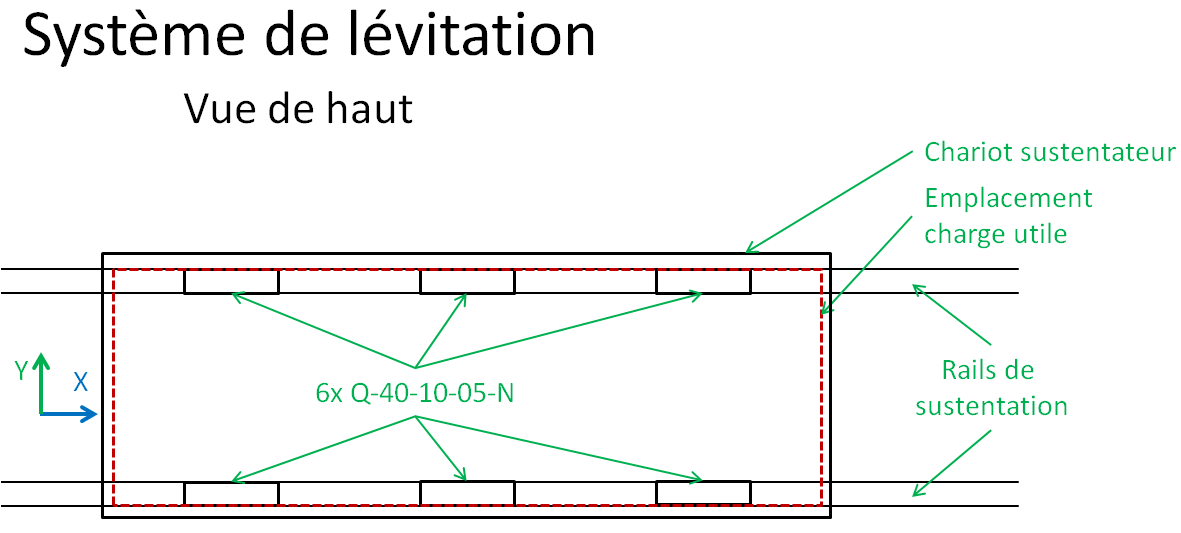
Actuellement, la lévitation magnétique est assurée par:
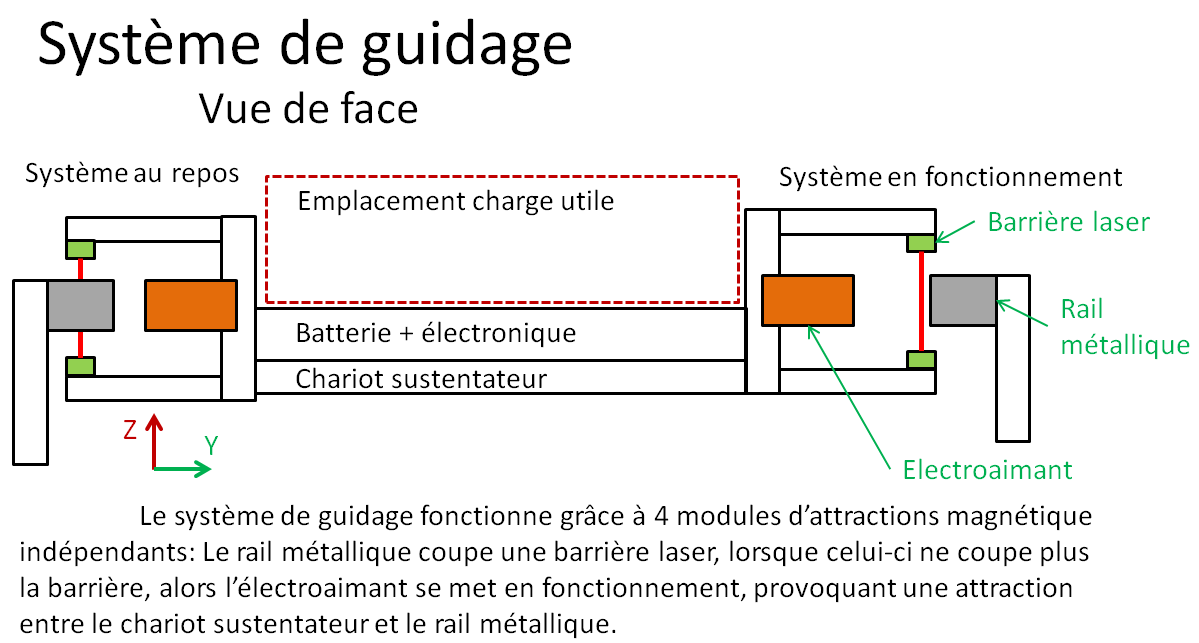
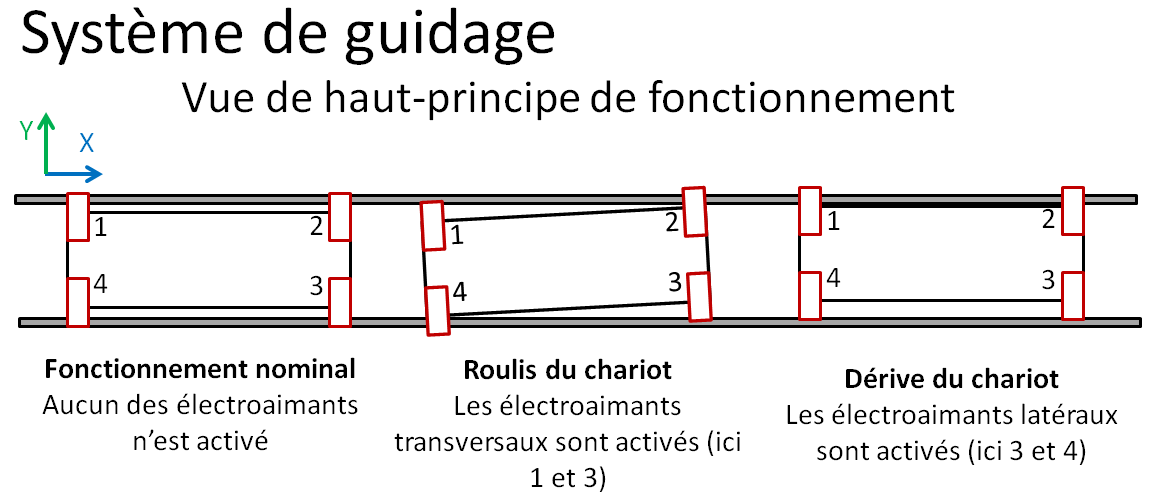
Système de guidage sans frottements assuré par des électro-aimants asservis
Après les difficultés rencontrées pour stabiliser dans l’axe Y le chariot, la conception du système de guidage s’oriente vers un système d’électroaimant actifs. Ce système présenterais les avantages suivants:
Simple à concevoir et fabriquer: En se basant sur le montage open-source disponible ici, la conception et fabrication de ce système ne nécessite que des compétence de base en électronique. Pas de programmation, ni d’asservissement.
Economique: En ayant des composants électroniques basiques sur les chariots sustentateurs et uniquement des pièces métalliques en guise de rail de guidage, la mise en œuvre coûte moins cher que l’utilisation d’aimants permanents
Simple à utiliser: Face aux difficultés rencontrées pour stabiliser le chariot avec des aimants permanents, l’utilisation d’un système actif rend la mise en œuvre beaucoup plus simple.
Actuellement le système de guidage est constitué d’ “oreilles” sur le chariot qui viennent frotter sur les rails de sustentations qui sont surélevés. Un tel système n’est pas acceptable du fait des frottements qu’il génère
Dans la future version, il est envisagée de fabriquer une maquette constituée de:
Sur le chariot: 4 modules d’attraction Electromagnétique indépendants alimentés par un même batterie (Les schéma sont à venir).
Deux rails métalliques pour assurer l’attraction par les modules de sustentation magnétique.
La maquette disponible actuellement avait pour but de vérifier la faisabilité des principes de bases que nous pouvions utiliser et a permis la sélection des technologies précédemment évoquées pour la ralisation de l’hyperloop miniature.
La nouvelle maquette en cours de conception a pour ambition de répondre au cahier des charges voire même au delà en raison des surdimensionnements dont elle fera l’objet.
En voie d’amélioration on peu noter:
Ajouter une plaque métallique en dessous des aimants sur les rails de sustentation : Permettrais d’augmenter la puissance des aimants de 30%
Mettre un rail central pour l’asservissement de la position latérale du chariot : Complexifie la conception mais améliore l’aspect visuel
Site web qui résume bien les différentes méthodes de lévitations magnétiques: http://www.train35.fr/monorail_levitation.html ; on peut remarquer que le seul moyen d’obtenir une lévitation sans frottements reste l’utilisation d’aimants supra conducteurs.
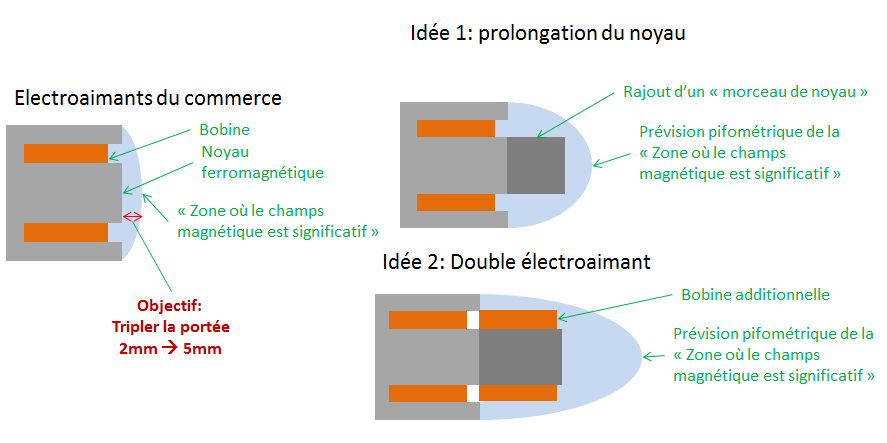
Après investigation, nous avons du mal à mettre au point le système de stabilisation magnétique puisque les électroaimants disponibles dans le commerce sont conçus pour avoir une adhérence très forte au contact, ceci au détriment de la portée du champ magnétique.
Quelqu’un a-t-il de l’expérience dans le design de circuits magnétique pour voir comment modifier/concevoir un électroaimant dont le champ magnétique aurait une portée plus importante?
Le problème, ainsi que mes idées sont résumées dans ce schéma: